登录之后可以开启更多功能哦
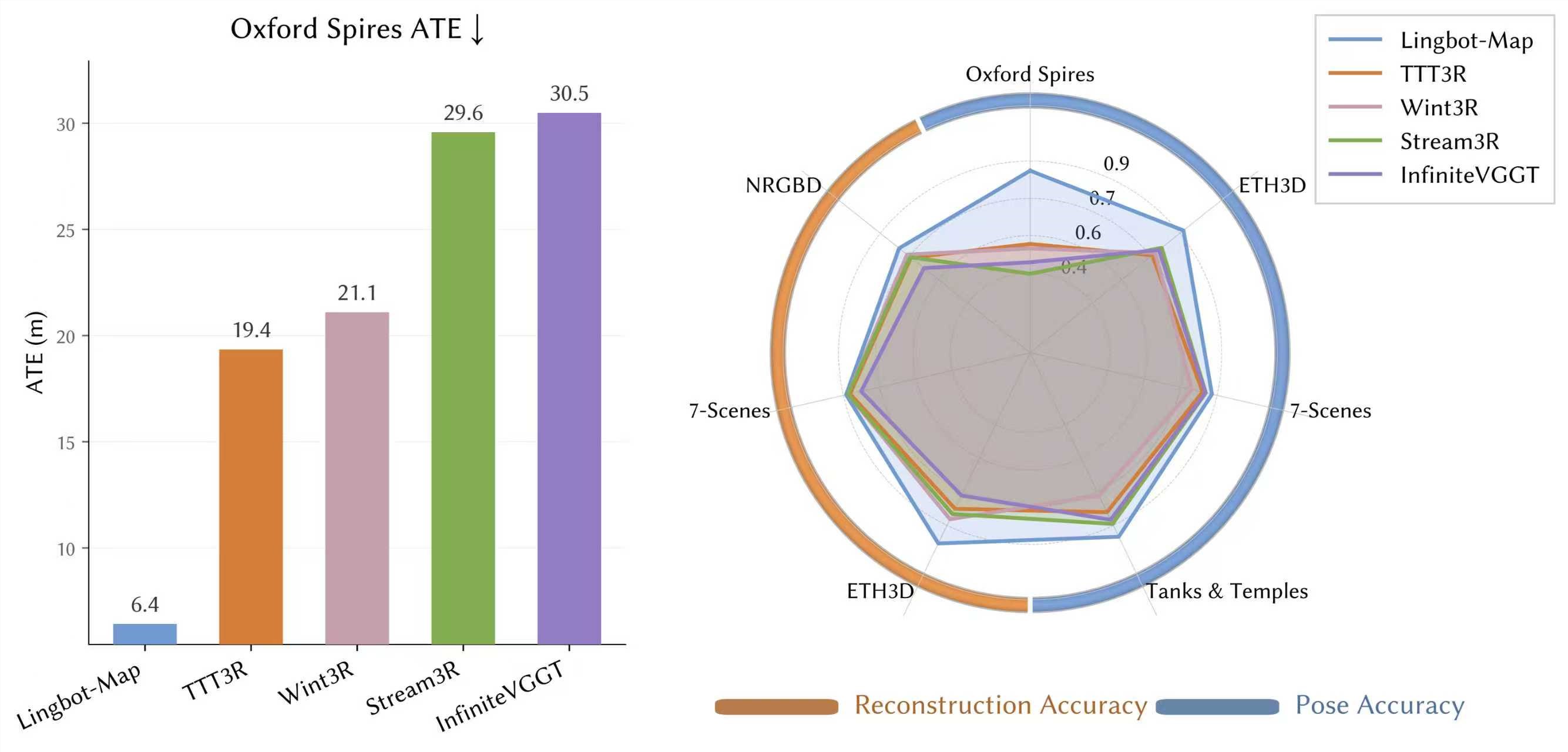
4月16日,蚂蚁灵波科技正式宣布开源流式三维重建模型 LingBot-Map。该模型突破性地实现了仅依靠单个普通 RGB 摄像头,即可在视频采集过程中实时估计相机位姿并重建场景三维结构。这一进展为
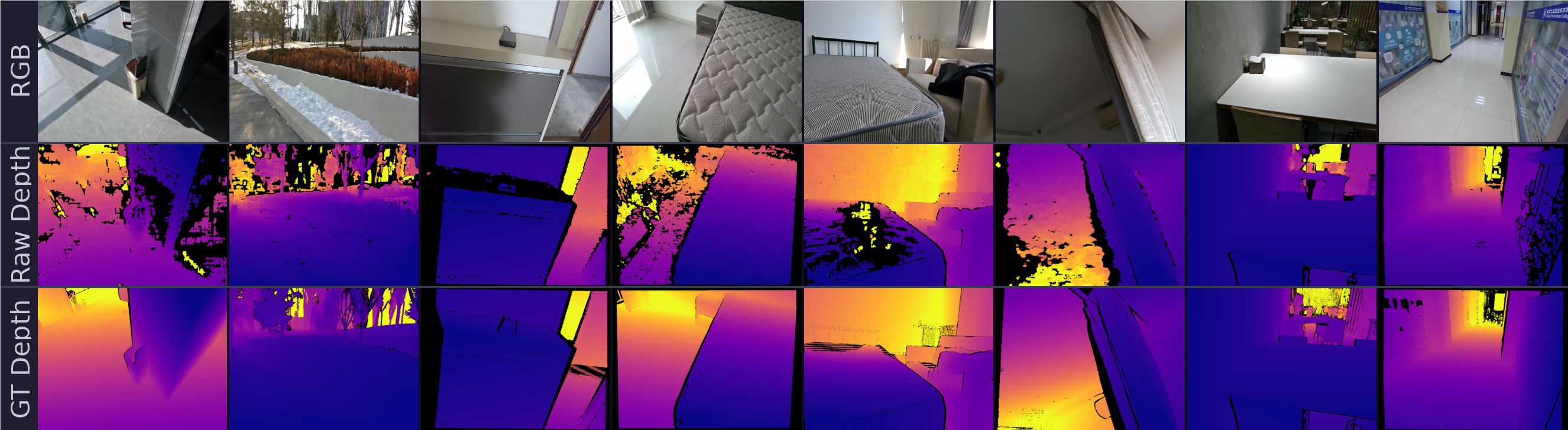
3月31日,蚂蚁灵波科技正式开源大规模 RGB-D 深度数据集 LingBot-Depth-Dataset。该数据集包含300万对高质量样本,其中200万对来自真实场景采集、100万对由