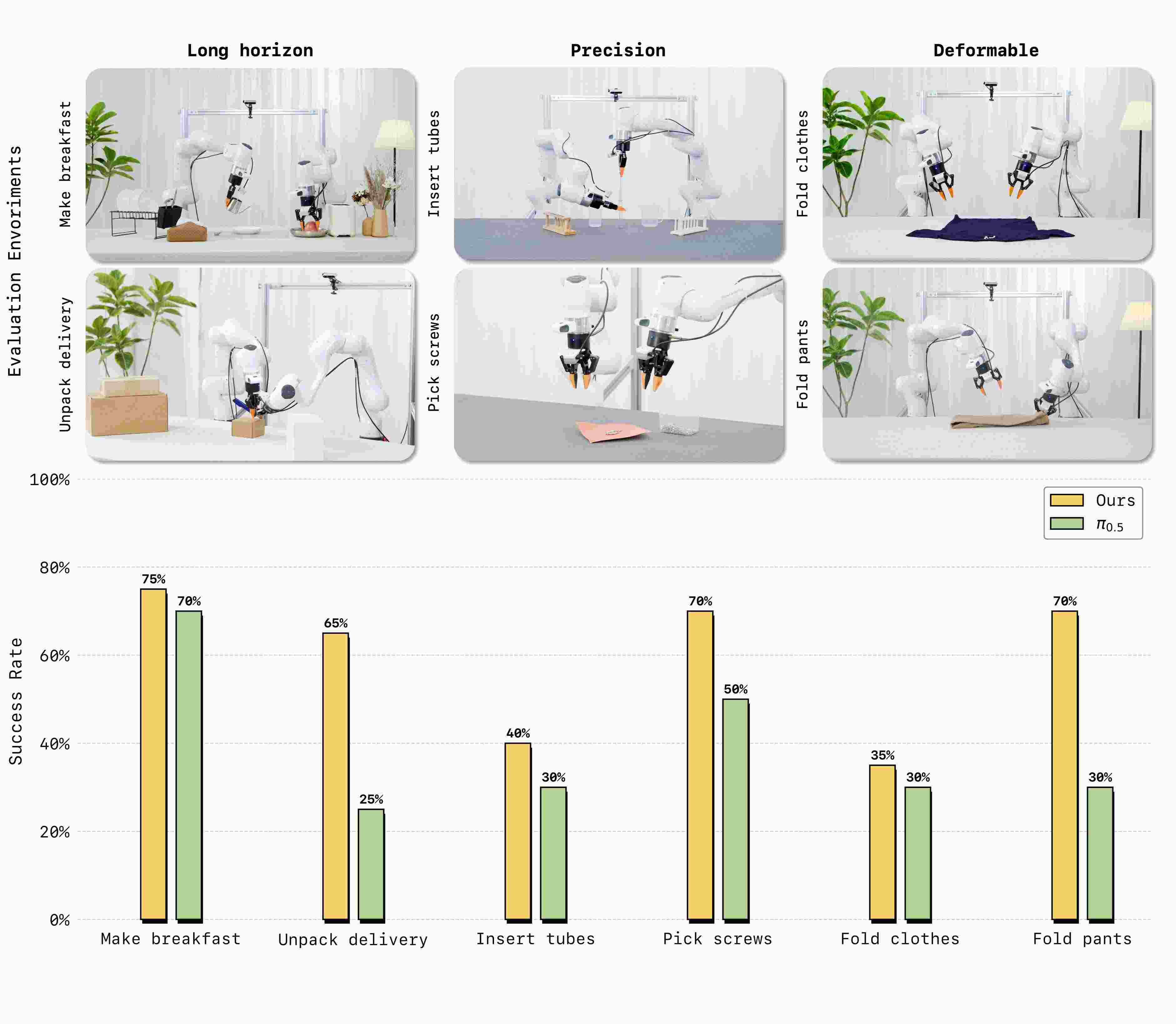
具身智能领域迎来重要技术突破。机器人企业越疆正式发布了其自主研发的世界动作模型——“空弈DobotWAM”具身大模型,标志着该品牌在推动机器人理解与执行复杂现实任务方面迈出了关键一步。 作为评估
近日,蚂蚁灵波科技与香港科技大学等高校合作完成的研究论文 《Causal World Modeling for Robot Control》被国际机器人顶级学术会议 Robotics: Scien
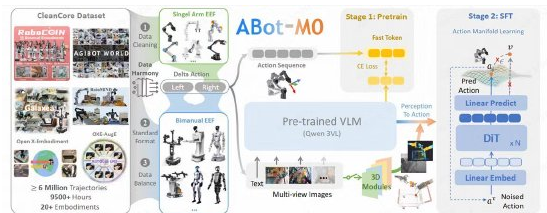
具身智能领域迎来里程碑式进展。高德于今日正式宣布全量开源全球首个基于统一架构的机器人具身操作基座模型 ABot-M0。该模型核心定位于实现“一个通用大脑适配多种形态机器人”,旨在打破异构硬件间的壁
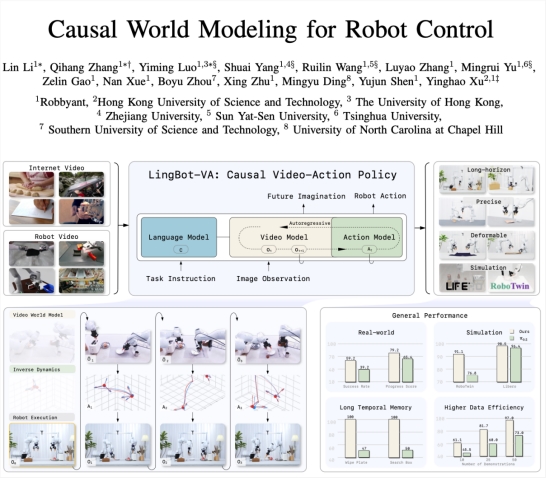
1月30日,继空间感知模型、具身大模型与世界模型“三连发”后,蚂蚁灵波科技今日宣布开源具身世界模型 LingBot-VA。LingBot-VA 首次提出自回归视频-动作世界建模
在人工智能和机器人技术快速发展的今天,视觉 - 语言 - 行动(VLA)模型被广泛认为是构建通用机器人的关键。然而,许多现有的 VLA 模型(如 OpenVLA、RT-2等)在处理复杂的非结构化环