登录之后可以开启更多功能哦
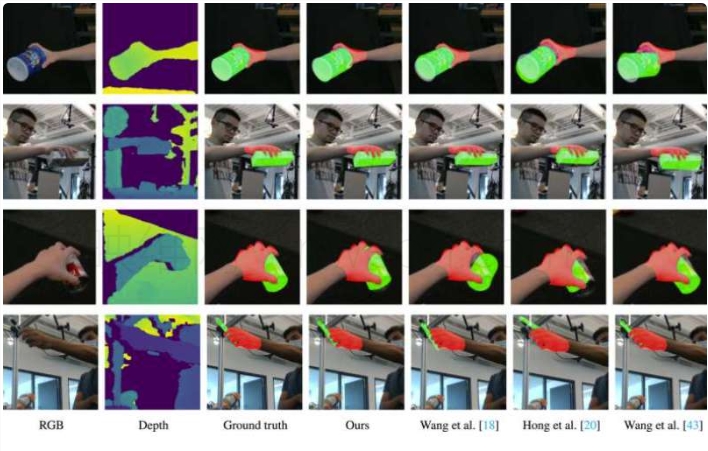
在增强现实(AR)等应用中,手持物体的姿态估计是一项至关重要但颇具挑战性的任务。近期,日本芝浦工业大学的研究团队提出了一种基于 Vote 机制的多模态融合框架,显著提高了这一领域的准确性,令人瞩目